
技术探索与创新
Research & Innovation
穹彻智能与上海交通大学人工智能学院团队已建立深度合作关系。双方聚焦人工智能前沿技术的研究与应用领域,携手开展创新实验、实现技术突破,并持续分享最新研究课题及已发布的论文成果。

Reactive Diffusion Policy: Slow-Fast Visual-Tactile Policy Learning for Contact-Rich Manipulation
反应式扩散策略:用于富接触操作的快慢视觉 - 触觉策略学习
通过设计快慢系统实现高效、稳定、灵敏的基于力觉、触觉的精细机器人操作。
AirExo-2: Scaling up Generalizable Robotic Imitation Learning with Low-Cost Exoskeletons
AirExo - 2:利用低成本外骨骼扩展可泛化的机器人模仿学习规模
通过设计低成本的外骨骼、数据迁移管线、和更加泛化的模仿学习算法实现基于野外采集数据的模仿学习。

AnyGrasp: Robust and Efficient Grasp Perception in Spatial and Temporal Domains
AnyGrasp:时空域中稳健高效的抓取感知
通过设计和训练高效、鲁棒、泛化的抓取点生成算法以支持机器人在任意场景中针对任意物体的二指抓取。

AnyDexGrasp: General Dexterous Grasping for Different Hands with Human-Level Learning Efficiency
AnyDexGrasp:以人类水平学习效率实现不同机器人末端的通用灵巧抓取
设计了以接触为中心的抓取表征,实现了针对任意形态、指头数量的操作末端都可以泛化的抓取算法。
RH20T: A Comprehensive Robotic Dataset for Learning Diverse Skills in One-Shot
RH20T:用于一次性学习多种技能的综合机器人数据集
通过建设数据采集工厂来收集以力为中心的大规模具身智能数据集。

RISE: 3D Perception Makes Real-World Robot Imitation Simple and Effective
RISE:3D感知让现实世界中的机器人模仿变得简单高效
设计了能够有效利用3D传感器数据的模仿学习算法以提升模仿学习对三维空间的感知能力、进而提升操作任务完成成功率。

CAGE: Causal Attention Enables Data-Efficient Generalizable Robotic Manipulation
CAGE:因果注意力实现数据高效且可泛化的机器人操作
通过引入视觉与训练模型、设计了因果注意力机制提升了模仿学习算法的泛化性,实现了模仿学习算法跨场景、跨物体、跨本体的部署。

FoAR: Force-Aware Reactive Policy for Contact-Rich Robotic Manipulation
FoAR:用于复杂机器人操作的力感知反应策略
通过在模仿学习中引入力觉信息,提升机器人操作的精确性。

SIME: Enhancing Policy Self-Improvement with Modal-Level Exploration
SIME:通过模态级探索实现策略的自提升
通过增强机器人的探索能力,实现机器人在部署阶段通过联系提升操作完成能力。

Knowledge-Driven Imitation Learning: Enabling Generalization Across Diverse Conditions
知识驱动的模仿学习:实现跨多样条件的泛化
在模仿学习的过程中引入物体知识,提升模仿学习策略在物体、场景等维度上的泛化能力、提升样本效率。
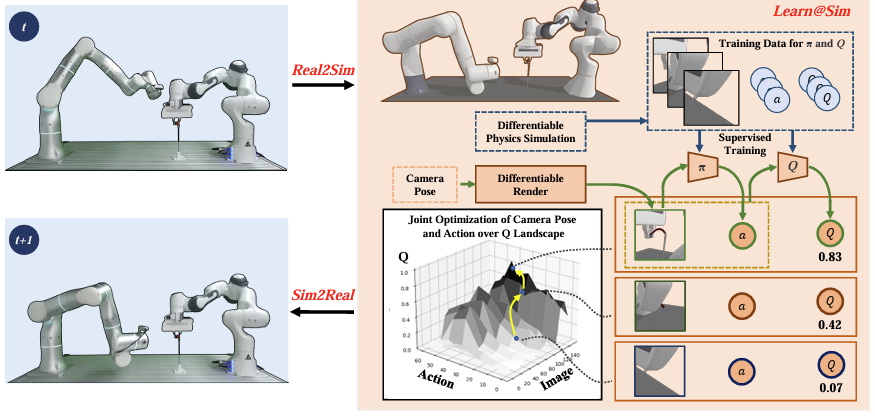
SAM-RL: Sensing-Aware Model-based Reinforcement Learning via Differentiable Physics-based Simulation and Rendering
SAM - RL:基于可微物理模拟与渲染的基于模型的强化学习
基于可微分仿真引擎与可微分渲染的Real2Sim2Real具身智能操作学习系统,并实现了主动感知以提升任务完成度。

Human-Agent Joint Learning for Efficient Robot Manipulation Skill Acquisition
用于高效机器人操作技能获取的人机联合学习
通过耦合具身智能数据采集与模型训练管线,提升具身智能的数据采集效率和算法训练效果。
UniFolding: Towards Sample-efficient, Scalable, and Generalizable Robotic Garment Folding
UniFolding:迈向样本高效、可扩展且具有通用性的机器人衣物折叠技术
首个实现材质、纹理泛化,并可处理杂乱状态的机器人叠衣服系统。

Demonstrating RFUniverse: A Multiphysics Simulation Platform for Embodied AI
RFUniverse:一个用于具身智能的模拟平台
提出了一种名为RFUniverse的新型仿真环境,该环境不仅能计算刚体和多体动力学,还能模拟日常生活中常见的多物理场耦合效应,例如气固相互作用、流固相互作用以及热传导现象。

