
Research & Innovation
Noematrix has established a close, collaborative relationship with the School of Artificial Intelligence at Shanghai Jiao Tong University. Together, we focus on researching and applying cutting-edge Embodied AI technologies, conducting innovative experiments, and achieving technological breakthroughs. We also continuously share the latest research topics and published paper findings.

Reactive Diffusion Policy: Slow-Fast Visual-Tactile Policy Learning for Contact-Rich Manipulation
Achieving efficient, stable, and sensitive fine robot operations based on force and tactile sensors through the design of slow-fast systems.

AirExo-2: Scaling up Generalizable Robotic Imitation Learning with Low-Cost Exoskeletons
Imitation learning based on in-the-wild data by designing low-cost exoskeletons, data migration pipelines, and more generalizable imitation learning algorithms

AnyGrasp: Robust and Efficient Grasp Perception in Spatial and Temporal Domains
By designing and training an efficient, robust, and generalizable grasp point generation algorithm to support robots grasping of any object in any scene.

AnyDexGrasp: General Dexterous Grasping for Different Hands with Human-Level Learning Efficiency
Designed a contact-centered grasp representation to achieve a grasping algorithm that can be generalized to robot end-effector of any shape and number of fingers.
RH20T: A Comprehensive Robotic Dataset for Learning Diverse Skills in One-Shot
Collecting a large-scale embodied intelligence dataset centered on force through the construction of a data collection factory.

RISE: 3D Perception Makes Real-World Robot Imitation Simple and Effective
An initation learning algorithm that can effectively utilize 3D sensor data was designed to enhance the perception ability of imitation learning in 3D space, thereby improving the success rate of manipulation tasks.

CAGE: Causal Attention Enables Data-Efficient Generalizable Robotic Manipulation
By introducing pretrained visual foundation models and designing a causal attention mechanism, the generalization of imitation learning algorithms is improved, enabling the deployment of imitation learning algorithms across scenes, objects, and embodiments.

FoAR: Force-Aware Reactive Policy for Contact-Rich Robotic Manipulation
Enhancing the precision of robotic manipulation by incorporating force information into imitation learning

SIME: Enhancing Policy Self-Improvement with Modal-Level Exploration
Enhancing the robot's exploration capability to enable it to improve manipulation performance during the deployment phase.

Knowledge-Driven Imitation Learning: Enabling Generalization Across Diverse Conditions
Integrating object knowledge into the imitation learning process to enhance the generalization ability of imitation learning and improve sample efficiency.
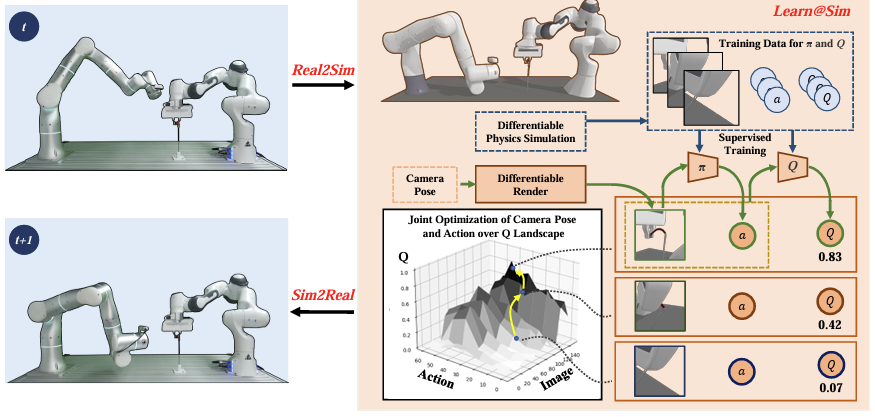
SAM-RL: Sensing-Aware Model-based Reinforcement Learning via Differentiable Physics-based Simulation and Rendering
A Real2Sim2Real embodied intelligent manipulation learning system based on differentiable simulation engine and differentiable rendering, which realizes active perception to improve task completion.

Human-Agent Joint Learning for Efficient Robot Manipulation Skill Acquisition
By coupling embodied intelligence data collection with model training pipelines, the data collection efficiency and algorithm training effectiveness of embodied intelligence are enhanced.
UniFolding: Towards Sample-efficient, Scalable, and Generalizable Robotic Garment Folding
The first robotic garment folding system that achieves material and texture generalization and can handle cluttered states.

Demonstrating RFUniverse: A Multiphysics Simulation Platform for Embodied AI
Proposes a new simulation environment called RFUniverse, which can not only compute rigid body and multi-body dynamics, but also simulate common multi-physics coupling effects in daily life, such as gas-solid interaction, fluid-solid interaction, and heat conduction.

